Next: 3.3.3 EPIC imaging - angular resolution Up: 3.3 EUROPEAN PHOTON IMAGING CAMERA (EPIC) Previous: 3.3.1.2 EPIC pn chip geometry
The EPIC cameras allow several modes of data acquisition. Note that in the case of MOS the outer ring of 6 CCDs remain in standard imaging mode while the central MOS CCD can be operated separately. Thus all CCDs are gathering data at all times, independent of the choice of operating mode. The pn camera CCDs can be operated in common modes in all quadrants for Full Frame, Extended Full Frame and Large Window mode, or just with one single CCD (CCD number 4 in Fig. 22) for Small Window, Timing and Burst mode.
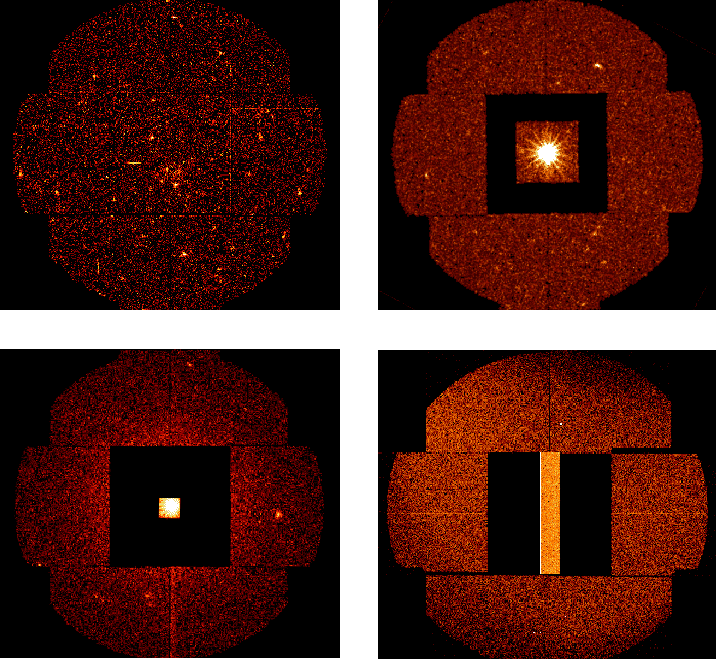
In this mode, all pixels of all CCDs are read out and thus the full FOV is covered.
a) MOS
In a Partial Window mode the central CCD of both MOS cameras can be operated in a different mode of science data acquisition, reading out only part of the CCD chip.
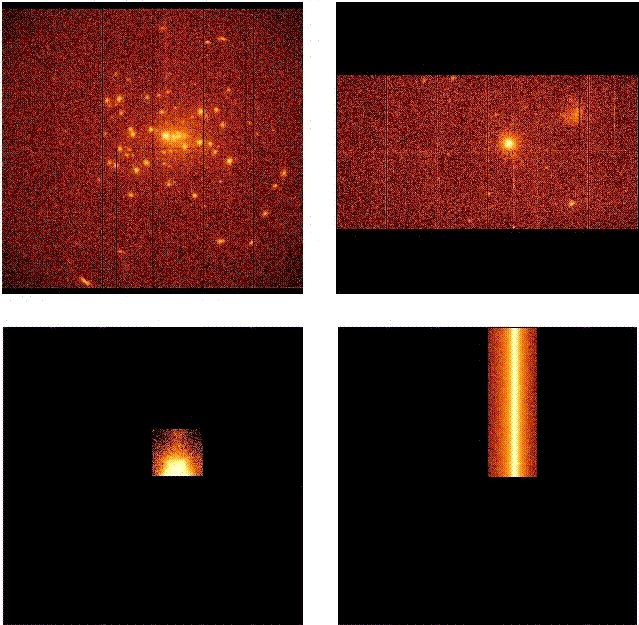
b) pn
In Large Window mode only half of the area in all 12 CCDs is read out, whereas in Small Window mode only a part of CCD number 4 is used to collect data. Note that the pn camera in these windowed modes is operated in such a way that non-read regions of the CCDs are exposed to the sky so that bright sources in these "dark" areas might still affect the observation.
a) MOS + pn
In the Timing mode, spatial information is maintained only in one dimension, along the column (RAWX) axis. For pn, the full width of CCD4 is active, whereas for MOS the active area is reduced to about 100 columns around the boresight. Along the row direction (RAWY axis), spatial information is lost due to continuous shifting and collapsing of rows to be read out at high speed. Since the 2 MOS cameras orientations differ by 90 degrees, the “imaging” direction in the 2 MOS are perpendicular to each other.
b) pn only
A special flavour of the Timing mode of the EPIC pn camera is the “Burst” mode, which offers very high time resolution, but has a very low duty cycle of 3%.
The most important characteristics of the EPIC science modes (time resolution and count rate capability) are tabulated in Table 3. Fig. 23 and Fig. 24 show the active CCD areas for the different pn and MOS readout modes, respectively.
| MOS (central CCD; pixels) [1 pixel = 1.1"] | Time resolution | Live time [%] [%] |
Max. count rate diffuse diffuse (total) [s (total) [s ] ] |
Max. count rate (flux) point source [s] ([mCrab] ) ) |
Full frame (600 600) 600) |
2.6 s | 100.0 | 150 | 0.50 (0.17) |
| Large window (300300) |
0.9 s | 99.5 | 110 | 1.5 (0.49) |
| Small window (100100) |
0.3 s | 97.5 | 37 | 4.5 (1.53) |
| Timing uncompressed (100600) |
1.75 ms | 100.0 | N/A | 100 (35) |
| pn (array or 1 CCD; pixels) [1 pixel = 4.1"] | Time resolution | Live time [%] |
Max. count rate diffuse (total) [s] |
Max. count rate (flux) point source [s] ([mCrab]) |
Full frame (376384) (376384) |
73.4 ms | 99.9 | 1000(total) | 2 (0.23) |
Extended full frame (376384) (376384) |
199.1 ms | 100.0 | 370 | 0.7 (0.09) |
| Large window (198384) |
47.7 ms | 94.9 | 1500 | 3 (0.35) |
| Small window (6364) |
5.7 ms | 71.0 | 12000 | 25 (3.25) |
| Timing (64200) |
0.03 ms | 99.5 | N/A | 800 (85) |
| Burst (64180) |
7  s s |
3.0 | N/A | 60000 (6300) |
 6%); b) the larger dynamical range in optical magnitude within
which optical loading does not affect the data.
6%); b) the larger dynamical range in optical magnitude within
which optical loading does not affect the data.
 erg s cm
erg s cm (in the energy range
2-10 keV).
(in the energy range
2-10 keV).
 |
 |
The count rate limitations are defined for a 2.5% flux loss (see
§ 3.3.9 and XMM-SOC-CAL-TN-0200 for details on pile-up) in point like sources. This level entails
a  1% spectral distortion, which in this case is defined as the complement
to 1 of the ratio between two measured count rates: the count rate of good
patterns originated exclusively by one individual photon and the count rate
of good patterns originated by all events.
Early estimates of spectral fitting errors without any response matrix
corrections show that a doubling of these count rates could lead to
systematic errors greater than the nominal calibration accuracies. The
Pile-up can be alleviated by excising the PSF core at
the penalty of losing overall flux, but retaining spectral fitting integrity,
modulo the accuracy in the calibration of the Point Spread Function wings.
1% spectral distortion, which in this case is defined as the complement
to 1 of the ratio between two measured count rates: the count rate of good
patterns originated exclusively by one individual photon and the count rate
of good patterns originated by all events.
Early estimates of spectral fitting errors without any response matrix
corrections show that a doubling of these count rates could lead to
systematic errors greater than the nominal calibration accuracies. The
Pile-up can be alleviated by excising the PSF core at
the penalty of losing overall flux, but retaining spectral fitting integrity,
modulo the accuracy in the calibration of the Point Spread Function wings.
For sources with very soft spectra, a factor of 2-3 lower maximum incident
flux limits are recommended, while maximum count rates remain unchanged,
see § 3.3.9.
For the pn camera also for point sources with hard spectra (power law
photon index  ) lower count rate limits should be applied, in
order to avoid X-ray loading (see XMM-SOC-CAL-TN-0050, available from http://www.cosmos.esa.int/web/xmm-newton/calibration-documentation).
For
) lower count rate limits should be applied, in
order to avoid X-ray loading (see XMM-SOC-CAL-TN-0050, available from http://www.cosmos.esa.int/web/xmm-newton/calibration-documentation).
For  =1.5 and 1.0 the maximum count rate limits
given in Table 3 should be reduced by factors 2
and 4, respectively.
=1.5 and 1.0 the maximum count rate limits
given in Table 3 should be reduced by factors 2
and 4, respectively.
One of the major differences between the two types of camera is the high
time resolution of the pn.
With this camera high-speed photometry
of rapidly variable targets can be conducted, down to a minimum integration
time of 30 (7) s in the Timing (Burst) mode.
The SAS task epatplot allows users to have a qualitative estimate of the level of pile-up affecting an input event list by comparing the observed and expected distributions of event PATTERNs. Users are referred to the description of this task in the SAS documentation (see also § 3.3.9 for details on pile-up).
European Space Agency - XMM-Newton Science Operations Centre